Bevezetés a
GPGPU
programozásba
- 6. óra -
Hidrodinamikai Rendszerek Tanszék
Parallel prefix sum
- Röviden: scan algoritmus
- Alapvető építőelem a párhuzamos algoritmusok között
- Definíció:
- tömb: $[a_0, a_1, ..., a_{n-1}]$
- asszociatív művelet: ◯
- identitás érték: I
- A scan művelet a tömbön:
- $[◯, a_0, (a_0 ◯ a_1), ..., (a_0, a_1, .., a_{n-2})]$
Parallel prefix sum
- Tehát ha az ◯ operátor például az összeadás:
- A [3 1 7 0 4 1 6 3] tömbből
- [0 3 4 11 11 15 16 22] tömb lesz.
- Megkülönböztetünk inclusive és exclusive scan-t.
- Felhasználási példák: rendezés(pl. leszámláló), sztring összehasonlítás, lexikális analízis, stream compaction ...stb.
Parallel reduction
- Ez egy egyszerűsített feladat.
- A tömbből most csak 1 adatot szeretnénk kinyerni:
- pl.: max reduction: a legnagyobb értékű elem a tömbben.
- pl.: sum reduction: a tömb elemeinek az összege.
- A redukció eredményét tipikusan a tömb 0. elemeként tároljuk.
- Megj.: A többi elemre semmit nem követelünk meg.
Parallel reduction
- Hasonlóan működik, mint a foci VB selejtező.
- A csapatok kettessével mérkőznek (bináris ◯ operátor).
- Ha 32 csapat van, az első körben 16 eredmény születik, a másodikban 8 ...stb.($log_2$ mélységű fa).
- Hatékony -> 1024 csapatból is 10 fordulóból megvan a győztes (persze kell 512 focipálya).
- Legyen az operátorunk most az összeadás (◯ = +).
Parallel reduction - kernel
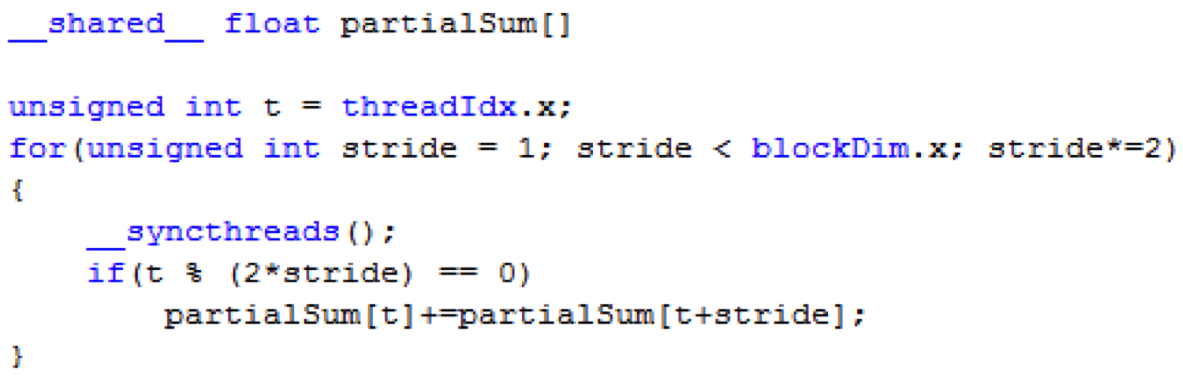
- Az input tömb a globális memóriában van.
- Minden block egy részt a shared memóriába másol, és ott redukálja.
- Rekurzívan felezgetjük az aktív szálak számát az elemszám feleződésével.
- (A kódrészet értelemszerűen nem tartlamazza a shared memóriába másolást.)
Parallel reduktion - szemléltetés
Parallel reduction
- Alaphelyzet, annyi szálat indítunk, ahány elemű a tömb.
- PROBLÉMA1: Ez pazarlás, a szálak fele csak az adatbetöltésben vesz részt -> nem dolgozik.
- PROBLÉMA2: A kernel kódban if szerepel -> szál-divergencia!
- (A nem futó szálak is elvisznek néhány órajelet).
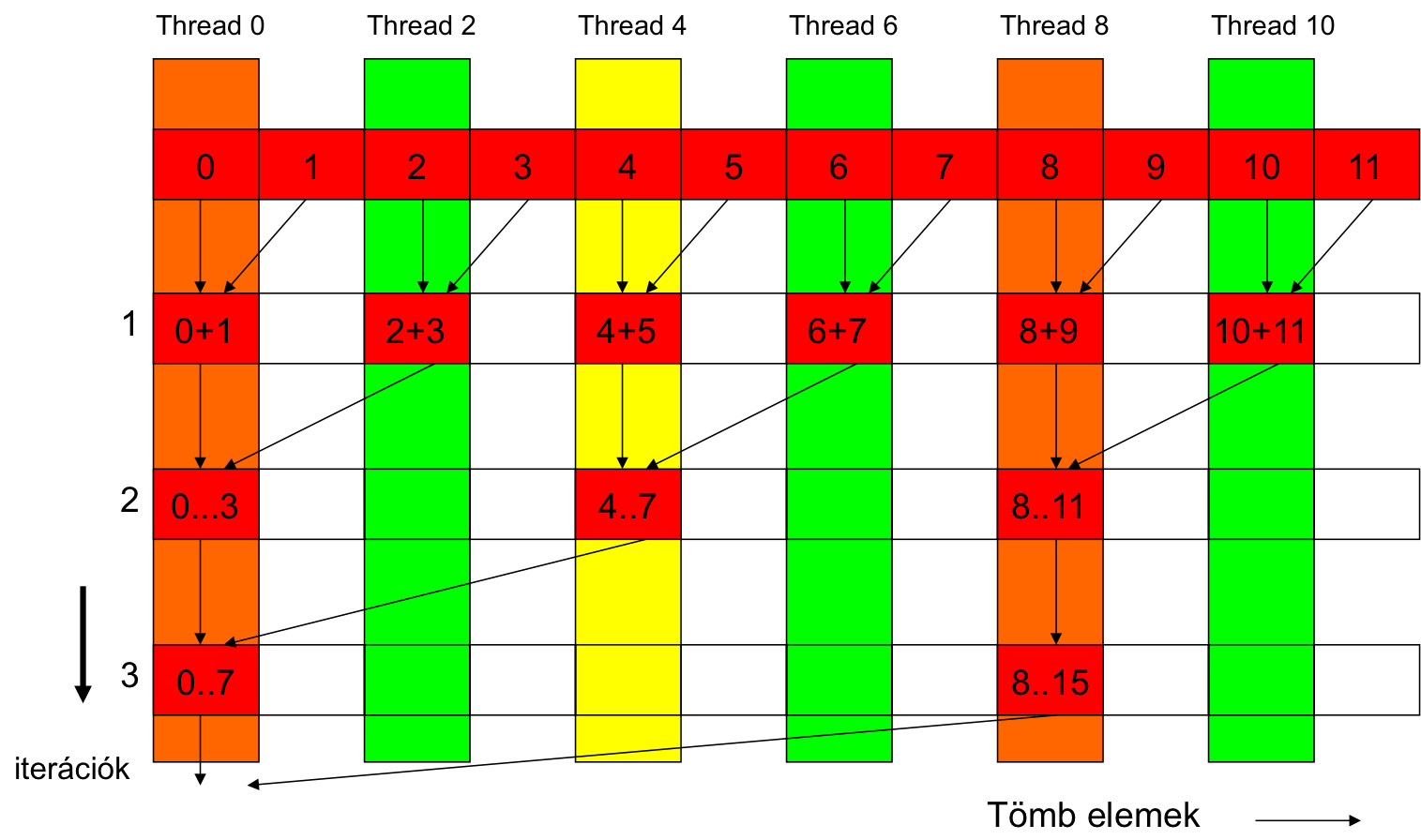
Parallel reduction - javítás

- Nem a szomszédos elemeket adjuk össze, hanem (az egy block-on lévő) rész-tömb másik felében lévővel.
- A >> operátor a bináris jobbra shiftelés itt. (bináris számrendszer = hatékony osztás kettővel.)
- (nb.: GPU-n próbáljuk kerülni a sima osztást.)
parallel reduction - javított működés
Az új működés
- Miért is jó? Még mindig van divergencia, és ugyan annyi dolgozó szál van.
- Az iterációkban egymás mellé kerülnek a futó és nem futó szálak.
- Ezáltal azonos warp-ba kerülnek -> nincs divergencia.
- (Ez az utolsó 5 iterációban nem lesz igaz - miért?)
Feladat I.
- Egészítsd ki a kódrészletet működő programmá:
- Beolvasás a shared memóriába.
- Több blokkon való futás.
- Végeredméynül visszaadja a tömb szummáját a 0-ik pozícióban.
Feladat II.
- Készítsd el a program módosított változatát:
- A kernel kód csak 1 iteráció.
- Több kernelhívással, változó futtatási konfigurációval érd el, hogy ne legyen "inaktív" szál sosem.
- Mennyivel hatékonyabb ez a program?
Tudásfelmérő:
#define VECTOR_N 1024
#define ELEMENT_N 256
const int DATA_N = VECTOR_N * ELEMENT_N;
const int DATA_SZ = DATA_N * sizeof(float);
const int RESULT_SZ = VECTOR_N * sizeof(float);
...
float *d_A, *d_B, *d_C;
...
cudaMalloc((void**)&d_A, DATA_SZ);
cudaMalloc((void**)&d_B, DATA_SZ);
cudaMalloc((void**)&d_C, RESULT_SZ);
...
scalarProd<<<VECTOR_N, ELEMENT_N>>>(d_C, d_A, d_B);
__global void scalarProd(float *d_C, float *d_A, float *d_B)
{
__shared__ float accumResult[ELEMETN_N];
float *A = d_A + ELEMENT_N * blockIdx.x;
float *B = d_B + ELEMENT_N * blockIdx.x;
int tx = threadIdx.x;
accumResult[tx] = A[tx] * B[tx];
for(int stride= ELEMENT_N / 2; stride > 0; stride >>=1)
{
__syncthreads();
if(tx < stride)
accumResult[tx] += accumResult[stride + tx];
}
d_C[blockIdx.x] = accumResult[0];
}
Kérdések
- Hány thread lesz összessen?
- Hány thread lesz egy warp-ban?
- Hány thread lesz egy block-ban?
- Hány global memory művelet lesz thread-enként?
- Hány hozzáférés lesz a shared memory-hoz block-onként?
- Lesznek bank-conflict-ot okozó sorok? Ha igen melyek?
- A for ciklus hány iterációja lesz divergens?
- Lehet szignifikánsan csökkenteni a global memory hozzáférést? Hogyan? Hány hozzéférést lehet megspórolni?